
Scénarios de démonstration
Plusieurs scénarios représentatifs des tâches agricoles ont été retenus, incluant des événements inattendus pour le robot. Ils prennent en compte la multiplicité des cas de figures autours de 4 thématiques dont les besoins sont particulièrement prégnants en agriculture :
– L’assistance à l’opérateur
– La réalisation d’un tache agronomique incluant l’utilisation d’un outil (pulvérisation, binage, …)
– La collecte autonome d’information
– Le transport de matériel vers une parcelle
Architecture(s) mécanique(s) reconfigurable(s)
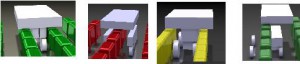
Une des originalités de ce projet est de proposer un système mécanique doté de degrés de liberté l’autorisant à adapter ses propriétés mécaniques pour affronter différentes situations et notamment :
– une voie et un empattement variables
– une garde au sol évolutive, pour passer entre des rangs ou les enjamber
– des suspensions pilotables pour les raidir ou assouplir en fonction des conditions de sol
Plusieurs concepts ont été étudiés, débouchant sur plusieurs types de solutions.
Plusieurs esquisses de châssis ont notamment été définies.
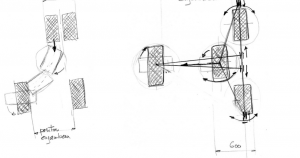
Ces concepts ont permis de concevoir un châssis reconfigurable
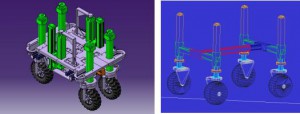
Aujourd’hui, au-delà du châssis unique, le projet accroît la modularité en étendant la notion de système robotique à un volet multi-robots, permettant d’envisager la réalisation de tâche de façon coordonnée.

Aujourd’hui, ces concepts se concrétisent par la fabrication du système robotique pour lequel des appels d’offres seront lancés en mars 2016.
Percevoir l’environnement avec plusieurs approches
Basée en premier lieu sur des algorithmes de perception existants (détection de personne, fusion GPS, centrale inertielle, détection par vision de structures), plusieurs approches additionnelles ont été réalisée dans le cadre de la première phase du projet. Pour le suivi de structure tout d’abord, des approches de comparaison et fusion entre laser et vision ont été développées, permettant de répondre à la problématique du suivi de contour (rang de végétation, bord de chemin, mur, …)
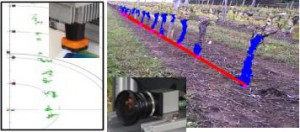
Le verrous le plus important reste néanmoins la perception 3D afin de pourvoir détecter des obstacles et plus généralement de juger du caractère traversable d’une zone devant le robot. Si l’utilisation de lidar 3D, comme le Velodyne, permet d’obtenir une réalité terrain, ce projet envisage des approches nécessitant des capteurs moins onéreux. En particulier, le couplage entre stéréovision et caméra temps de vol (ToF – Time of Flight) est un travail en cours de réalisation.
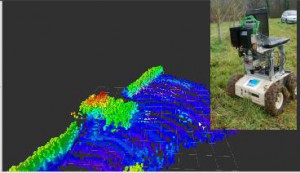
Au-delà de la localisation et la perception, il s’agit également de pouvoir évaluer en temps réel la précision des algorithmes en vue de garantir les performances et d’adapter le comportement du robot en cas de difficulté de perception (limitation de vitesse, modification de la hauteur, etc.).
Lois de commande et comportements
Le contrôle comprend ici deux volets : l’asservissement « intègre » des déplacements et le pilotage des mobilités du châssis reconfigurable (hauteur, suspensions, etc.).
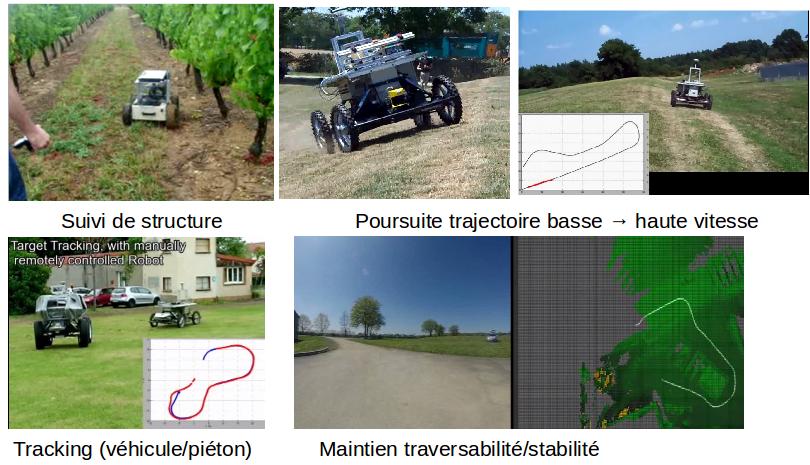
En premier, lieu le contrôle des déplacements a tout d’abord exploités les lois de commandes obtenues dans des projets précédents ou connexes, afin d’obtenir un asservissement précis des déplacements. Néanmoins le contrôle d’un robot dans des zones difficiles, comme les milieux naturels, requière la prise en compte des limitations physiques du robot afin d’éviter les situations critiques que sont : le renversement, l’enlisement ou les phénomènes de tête à queue, la collision avec un obstacle. La préservation de la sécurité passe par la nécessaire modulation de la vitesse et des trajectoires. Aussi, la première année du projet a été consacrée sur la synthèse de mode de commande capables d’appréhender les risques et d’être robuste vis-à-vis des variations de vitesse. La figure ci-dessous illustre les différents modes de commande des déplacements réalisés à ce jour et en cours de test et de validation.
Les travaux en cours concernant les déplacements se focalisent sur la perception attentionnelle, et notamment sur la modification des déplacements pour garantir une bonne visibilité de la scène ou la précision des informations de localisation.
Les développements en cours sont essentiellement portés sur la modification de la configuration du robot et son association avec d’autres robots pour concevoir un système robotique reconfigurable.










Commentaires récents